Siddharth Nathella | Research
Academic Research
Pediatric gait rehabilitation with exoskeletons and biofeedback
The goal of this research is to develop method and tools to personalize robotic gait therapy for children with walking impairments caused by neurological injuries. I aim to use real time measures of motor learning to adapt assistive controllers to each patient's needs. Currently, I have explored using numerical optimization to identify patient-specific control parameters that maximize motor learning during robotic gait therapy. Check out our ICORR submission to see some cool results!
The goal of this research is to develop method and tools to personalize robotic gait therapy for children with walking impairments caused by neurological injuries. I aim to use real time measures of motor learning to adapt assistive controllers to each patient's needs. Currently, I have explored using numerical optimization to identify patient-specific control parameters that maximize motor learning during robotic gait therapy. Check out our ICORR submission to see some cool results!

Open-source mechatronics systems
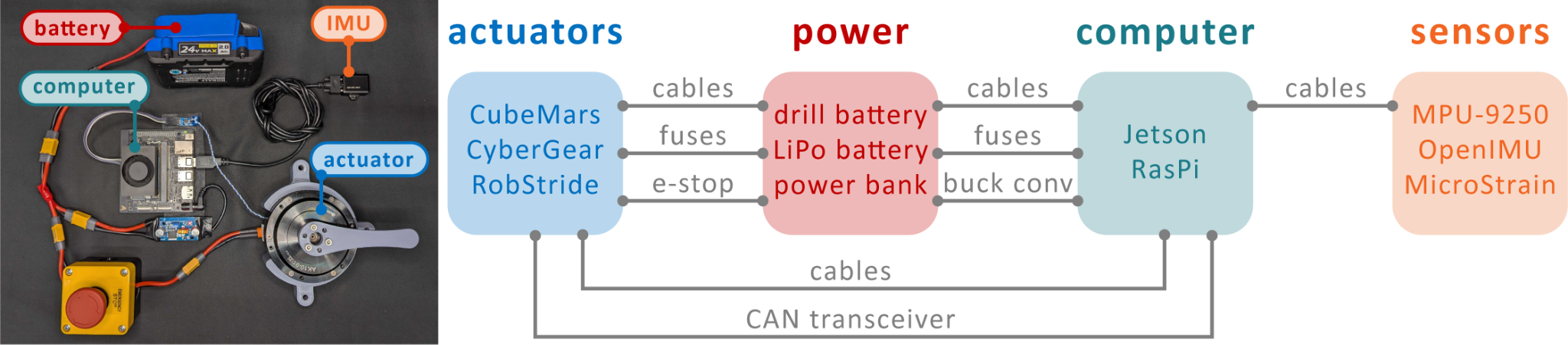
“Epically Powerful” is an open sourced mechatronics platform, covering hardware selection, setup, and control. A Python package provides simple interfaces to control various quasi-direct drive motors, read from inertial measurement units (IMUs), and log data. The goal of this project is to lower the barrier to entry for robotics research by providing an easy to use software framework.
“Epically Powerful” is an open sourced mechatronics platform, covering hardware selection, setup, and control. A Python package provides simple interfaces to control various quasi-direct drive motors, read from inertial measurement units (IMUs), and log data. The goal of this project is to lower the barrier to entry for robotics research by providing an easy to use software framework.
Autoencoder based computation of motor modules
In research on the neural control of movement, motor modules (aka: muscle synergies) are often used to describe fundamental patterns of coordinated muscle activity. It is hypothesized that these modules reflect underlying neural control strategies. However, traditional methods to compute motor modules (e.g., non-negative matrix factorization) can produce modules that are difficult to interpret, and have inconsistent structures depending on the number of modules chose. I developed an autoencoder-based approach, which improves the interpretability and stability of computed motor modules. Check out our bioRxiv preprint for more details!
In research on the neural control of movement, motor modules (aka: muscle synergies) are often used to describe fundamental patterns of coordinated muscle activity. It is hypothesized that these modules reflect underlying neural control strategies. However, traditional methods to compute motor modules (e.g., non-negative matrix factorization) can produce modules that are difficult to interpret, and have inconsistent structures depending on the number of modules chose. I developed an autoencoder-based approach, which improves the interpretability and stability of computed motor modules. Check out our bioRxiv preprint for more details!
Personal Projects
Simple robotics interprocess-communication
“Starling” is my personal solution for interprocess-communication (IPC) in robotics applications. ROS is the defacto tool for this, but can be overly complex, and in its current Python implementation incurs an unacceptable overhead. Starling is a lightweight alternative, built on ZeroMQ, that provides simple and fast IPC, along with data logging and full introspection tooling. Starling supports Python right now, with GoLang support in progress.
“Starling” is my personal solution for interprocess-communication (IPC) in robotics applications. ROS is the defacto tool for this, but can be overly complex, and in its current Python implementation incurs an unacceptable overhead. Starling is a lightweight alternative, built on ZeroMQ, that provides simple and fast IPC, along with data logging and full introspection tooling. Starling supports Python right now, with GoLang support in progress.
MTG life tracker
As a casual Magic: The Gathering player, I built a simple life tracking web-app to keep track of life totals during remote web-cam games. This app syncronizes over the web using lobies, and is implemented using pure HTML and JS with a Flask backend.
As a casual Magic: The Gathering player, I built a simple life tracking web-app to keep track of life totals during remote web-cam games. This app syncronizes over the web using lobies, and is implemented using pure HTML and JS with a Flask backend.